Remote-controlled robot with dual arms and live video for safe object retrieval in hazardous areas.

The Teleoperated Robotic Assistant (a.k.a Mr. Krabs) is a remotely controlled, multifunctional robot developed to enable safe and efficient inspection and object retrieval in hazardous environments. Designed and built from the ground up as my final mechanical engineering capstone project at North Central College, the robot integrates advanced mobility with omnidirectional mecanum wheels, dual 3-DOF robotic manipulators, and live video feedback for remote operation.
Engineered with versatility and user safety in mind, the robot is capable of lifting light payloads (350g), navigating tight and obstructed spaces, and providing real-time situational awareness through a 5.8GHz FPV camera system. It achieves speeds exceeding 1 m/s and supports remote control ranges up to 100 meters outdoors, ensuring responsiveness even in complex scenarios.
Inspired by industrial mobile robots and the dexterity of crabs, this project bridges the gap between automated systems and human teleoperation. It was recognized with the "Best Capstone Project — Spring 2025" award for meeting and exceeding design objectives, demonstrating robust performance, and offering real-world value for industries ranging from manufacturing and laboratories to nuclear plants.
In the many industries, especially in nuclear power plants, laboratories, and manufacturing facilities, hazardous conditions can make human intervention unsafe or inconvenient. Tasks such as routine inspection, object retrieval in confined spaces, and material transport in contaminated zones expose workers to hazards such as radiation, chemical exposure, or structural instability. In these cases, minimizing human exposure while maintaining operational efficiency is essential.
This project was inspired by the challenge of creating an inexpensive, remotely operated robotic "crab" with the capability to perform important operations while maintaining the human operators at a safe distance. Drawing inspiration from nature, specifically the versatility and dexterity of crab claws, the robot was designed with two independent 3-DOF manipulators in an effort to enable handling objects in tight or difficult-to-reach spaces.
By combining this manipulator design with omnidirectional mobility and real-time visual feedback, the system offers both precise control and situational awareness , enabling operators to safely perform operations from as far away as 100 meters.
The Teleoperated Robotic Assistant was designed around three principles: mobility, live video feedback, and intuitive remote control. Each subsystem, from the omnidirectional wheels to the pair of robotic manipulators, was carefully designed to work together to provide responsive remote operation in hazardous environments. This project was manily built using materials like aluminum, PLA and acrylic due to budget restrictions ($250). However, if the robot was to actuallaly venture into radioctive grounds, more radiation-resilient materials would be used, like PEEK filament instead of PLA and acrylic. But due to budget constraints, I've used PLA to showcase that he design works.

The foundation of the robot is a durable yet lightweight 2020 T-slot aluminum frame, which provides structural stiffness but is modular for easy adjustments and upgrades. Movement is made possible by four mecanum wheels, each driven by a DC motor (12V 1A 200 RPM) independently, allowing the robot to move in all directions, forward, backward, sideway, and diagonally, and turn around its axis. Such mobility makes it specially designed to pass through narrow passages and complex arrangements typically encountered in hazardous or cluttered spaces.
Symmetrically mounted on the front of the chassis are two RRR 3-Degrees-of-Freedom (3DoF) robotic manipulators, each under independent control. Crab-claw-inspired, these arms were designed to pick up, hold, and release objects up to 350 grams per object, far more than the initial design objective of 200 grams. All the parts in the manipulators were designed using SolidWorks and were 3D printed. Each manipulator uses a combination of servo motors and custom claw-like end-effectors, providing smooth and reliable gripping, lifting, and rotation to handle small objects during operation. Below you can see an initial demonstration of the robotic manipulators moving their end-effectors:
The hub of the control system of the robot is an Arduino Mega 2560, which takes care of communication between various components like the mecanum wheels (on 12V DC Motors), robotic arms, ultrasonic sensors, NeoPixel status LEDs, and audio feedback modules. A PCA9685 servo driver enables coordinated motion of of 10 servos, while two L298N motor drivers control two DC motors driving the chassis.
For power, a 12.6 V 5200 mAh Li-ion battery powers motors and components (DC, Servos, speaker, LEDs, etc) with sufficient power to operate for over 30 minutes on a single charge. Meanwhile, a 12.6V 1200 mAh Li-on battery powers the logic of the robot (Arduino Mega 2560, PCA9685 PWM Driver and L298N DC Drivers) through a buck converter for stability.
The Electronics Hub and the eyes were designed on SolidWorks. The Electronics Hub box was cut from acrylic and the other parts were 3D printed in PLA.
The robot is teleoperated solely by radio control, using of a 2.4 GHz RC receiver and transmitter with stable control in an open environment up to a distance of 100 meters. For real-time video feedback, a 5.8 GHz FPV video camera streams video directly on to the screen of the operator, where a 5.8GHz receiver is connected. The video feedback range is around 50 meters in open spaces and around 15 meters for indoor spaces with obstacles/walls in between.

The robot’s dual 3-DOF robotic arms are central to its ability to perform versatile tasks. Each manipulator follows a revolute-revolute-revolute (RRR) configuration, allowing the end effectors to position and orient objects in space with flexibility similar to human wrists. These manipulators were carefully designed not only for dexterity, but also to handle real-world mechanical demands.
To achieve precise control, both forward and inverse kinematics were modeled and calculated for each arm. Using Denavit–Hartenberg (DH) parameters and homogeneous transformation matrices, I derived the equations necessary to map joint angles to end-effector positions and vice versa. These calculations were validated through simulations in MATLAB's Peter Corke Robotics Toolbox, confirming the accuracy of the motion paths and the work envelope of the arms.
Each joint’s torque requirements were meticulously calculated based on real-world loads and dynamic conditions:
Joint 1 and Joint 2, responsible for lifting and positioning the arm, required higher torque and were therefore equipped with high-torque DS3218MG servo motors (19 kgf*cm).
Joint 3, which handles rotation of the end effector, uses smaller and lighter MG90S (2.2 kgf*cm) servos, optimized for speed and responsiveness without unnecessary load capacity.
The end effector (claw) was designed to securely grip objects using calculated friction and force requirements, ensuring it could lift up to 350 grams per arm without slippage, so a high torque INJORA micro servo was used, INJS2065 (7 kgf*cm).
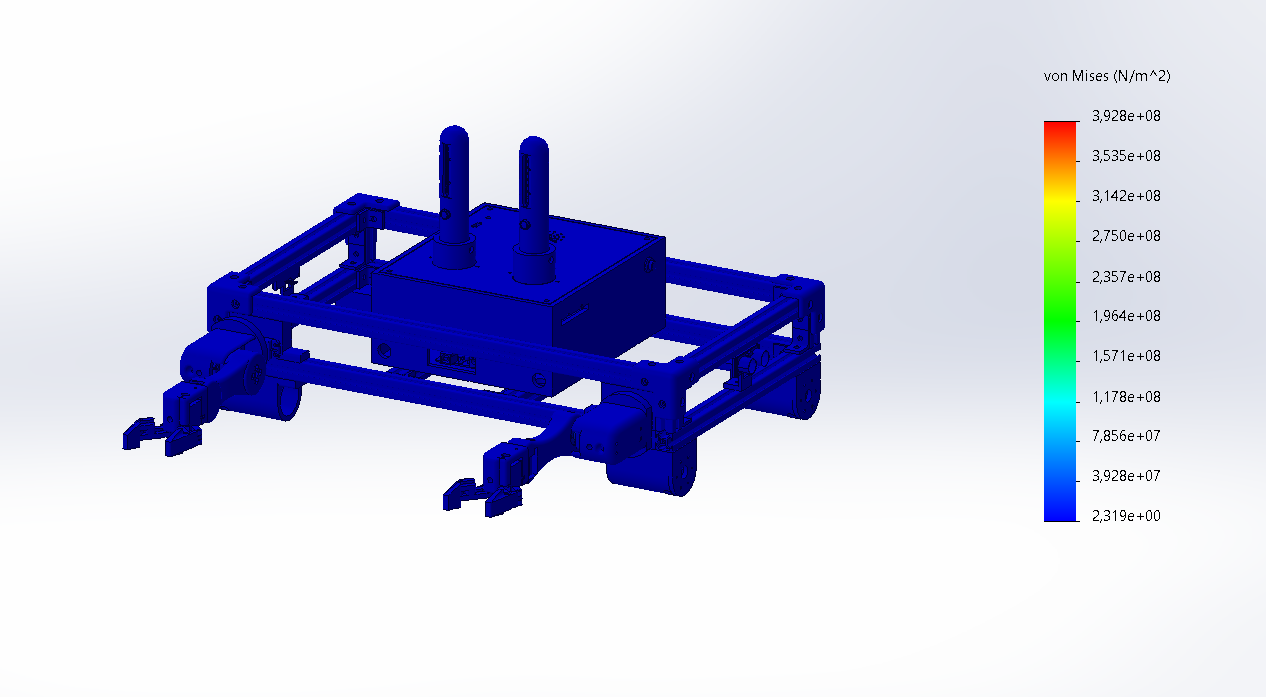
To verify the structural integrity of the manipulators and of the entire robot, Finite Element Analysis (FEA) was conducted in SolidWorks using Von Mises stress analysis method. These simulations tested worst-case scenarios where the arm was fully extended while lifting maximum payloads. Results showed stresses well below the yield strength of PLA, Aluminum and Acrylic, indicating the system was mechanically sound for operational use.
To operate effectively and safely in hazardous environments, Mr. Krabs integrates a robust and layered control and communication system, combining low-latency radio control, onboard processing, and real-time video feedback.
The robot’s motion and manipulation are operated through a 2.4 GHz RC radio transmitter and receiver, commonly used in drone and RC vehicle applications. This system was selected for its simplicity, reliability, and proven range.
Testing confirmed stable and responsive control at distances of up to 100 meters in open environments, with consistent performance in complex indoor settings as well.
The RC controller provides intuitive control of:
In environments where the robot is beyond line of sight, real-time video feedback is essential. The system features a 5.8 GHz FPV camera and transmitter, which streams live video directly to the operator’s display through a paired receiver.
This setup enables:
At the heart of the robot is the Arduino Mega 2560, which coordinates all onboard operations. It manages commands from the RC receiver, drives servos and motors through PCA9685 and L298N motor drivers, and integrates sensory feedback.
Safety and status indication features include:
Once fully assembled and programmed, the Teleoperated Robotic Assistant underwent extensive performance testing to validate its design objectives and ensure reliability in real-world scenarios. These tests focused on mobility, arm functionality, speed, and accuracy, as well as integration between all subsystems during remote operation.
To assess driving performance, the robot was tested on various indoor and outdoor surfaces with emphasis on maneuverability in constrained environments. Thanks to its mecanum wheels and precise motor control, Mr. Krabs demonstrated smooth omnidirectional movement, including lateral and diagonal translations as well as tight in-place rotations.
A speed trial was also performed to evaluate its ability to respond quickly when necessary. During the test, the robot traveled a straight-line distance of 2 meters in approximately 2 seconds, achieving an average velocity of 1 m/s. This confirmed that the robot met its design target of combining precision with speed for time-sensitive operations. Below you can see the speed test video where Mr. Krabs ran from two points 2 meters apart withing 2 seconds:
Each robotic arm was tested independently and together to verify:
The arms were able to pick up, reposition, and release objects reliably during teleoperated tasks, demonstrating excellent coordination with the live video feedback system for precise remote handling.
Prior to physical implementation, simulated testing was conducted in MATLAB's Peter Corke Robotics Toolbox to validate joint trajectories and workspace reachability. These simulations guided initial tuning and were later compared with real-world motion to confirm kinematic accuracy. The robot closely followed the programmed paths, proving that the calculated inverse kinematics solutions were successfully implemented. Below you see the trajectory planning simulation of the 3DoF RRR Manipulator using MATLAB's Robotics Toolbox:
Finally, full integrated testing was performed where the robot was remotely operated under typical use conditions:
The robot consistently demonstrated stable performance, smooth teleoperation, and safe handling capabilities, reinforcing its suitability for deployment in controlled hazardous environments. Below you can see the robot executing a "Test Mission" testing several of its functions:
After months of design, prototyping, troubleshooting, and iterative improvements, the Teleoperated Robotic Assistant (Mr. Krabs) successfully met and exceeded all project objectives. The robot proved itself as a reliable, multifunctional platform capable of remote operation in hazardous or difficult environments.
The system showcased:
These achievements made Mr. Krabs stand out not only as a successful engineering project, but also as a practical prototype demonstrating real-world relevance for industrial, laboratory, and emergency response applications.
The project's success was officially recognized during the Spring 2025 Engineering Capstone Showcase at North Central College, where it received the "Best Capstone Project — Spring 2025" award. This award was especially meaningful as it reflected recognition from both faculty and public voting, highlighting the project’s combination of technical achievement, innovative design, and clear practical value.
Below is a photo taken during the Engineering Capstone symposium, showing myself holding both Mr. Krabs and the award trophy:

The robot and project were selected as the outstanding project by both public and faculty votes.
This recognition served as the culmination of the project's journey and a testament to the countless hours dedicated to design, testing, problem-solving, and optimization.